Bob McGwier : 開発中の安価な「水中の UFO」検知システムを語る
(全体俯瞰 : AI 生成) click で拡大
前置き
6年前の過去記事、
Dr. Bob McGwier : skyhub 計画 : 安価(数万円)な個人用 UFO 探知追跡システムが 1-2年で実用化される。 (2020-07-11)
で取り上げた "Sky Hub" に類似した UFO 探知装置の開発計画を Bob McGwier が最近の遠隔インタビューで語っている。"Sky Hub" の話は Web でも見かけないようなので、実質的には中断状態か。
冒頭から延々と別の話題に関する告知が続くので、6:30 まで skip 推奨。
要旨
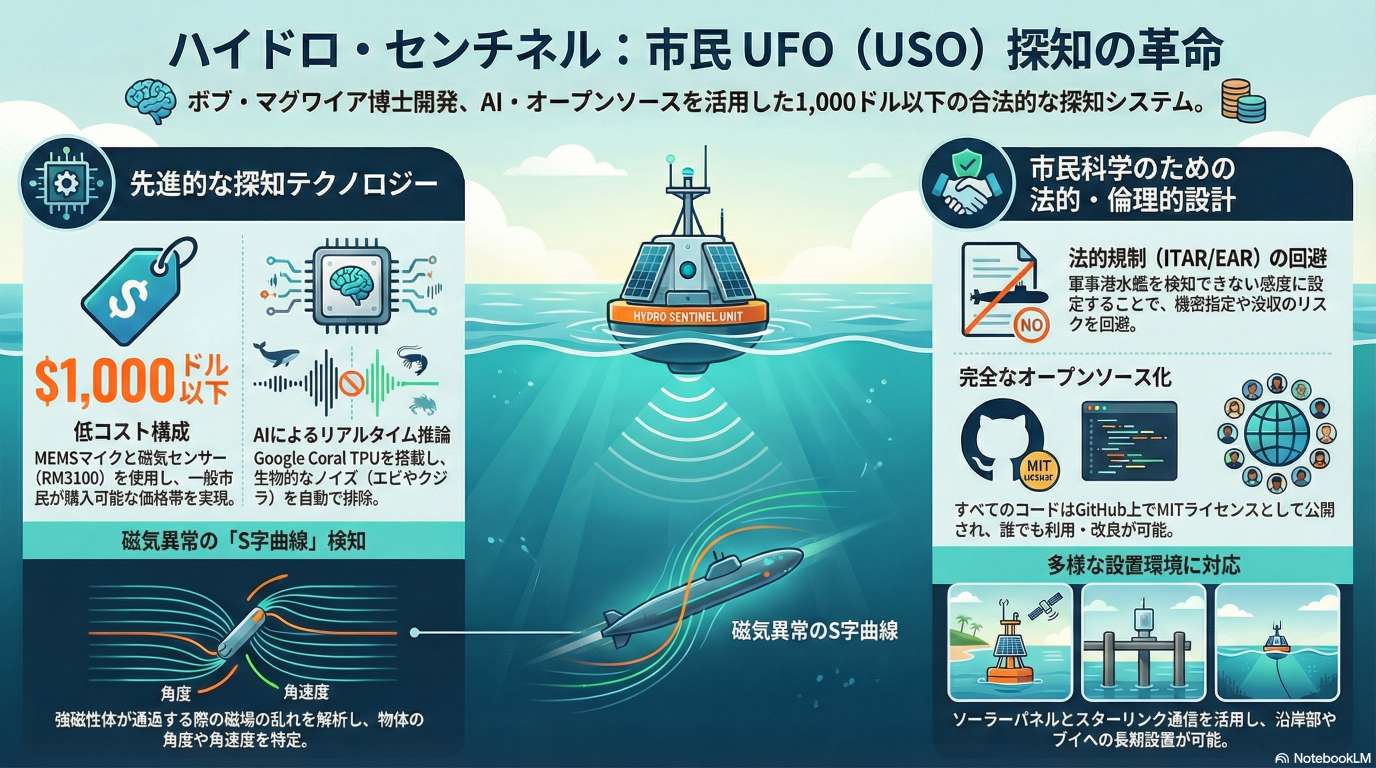
Bob McGwier 氏は、UFO/USO(未確認潜水物体)を低コストで検知する市民参加型システムを開発中です。AI(機械学習)や磁気センサー、水中マイクを活用し、軍の機密に触れない範囲で科学的データを収集。コードはGitHubで公開予定です。
目次
- 前置き
- 要旨
- ブリーフィング・ドキュメント:UFO/UAPおよびUSO追跡のためのリアルセンサー・システム
- 海洋観測・USO検知ネットワーク「ハイドロ・センチネル」構築に関する技術提案書
- 技術評価報告書:民間主導型UAP/USO検知システムの技術検証と規制遵守
- 水中の未知を解き明かす:低コスト・高性能探知システム「ハイドロ・センチネル」の仕組み
- インテリジェンス・パイプライン:センサーデータから真実を導き出す仕組み
- ゲスト : Bob McGuire
- 水中物体(USO)検出システム : Hydro Sentinel
- AI とデータ処理
- 関連プロジェクトと知見
- 今度の課題
- 情報源
ブリーフィング・ドキュメント:UFO/UAPおよびUSO追跡のためのリアルセンサー・システム
エグゼクティブ・サマリー
本文書は、応用数学および信号処理の専門家である Bob McGwier 博士(Dr. Bob Maguire)による、未確認航空現象(UAP)および未確認潜水物体(USO)の検知技術に関する知見をまとめたものである。 McGwier 博士は、国家安全保障レベルでのデータ分析や、15億ドル規模の衛星企業「ホークアイ360(Hawkeye 360)」の創設に携わった経歴を持つ。
本資料の核心は、憶測を排除し、科学的データに基づいた「草の根」レベルでの検知システムの構築にある。 McGwier 博士は、低コストのセンサー、AI(人工知能)、およびオープンソースのソフトウェアを組み合わせた「ハイドロ・センチネル(Hydro Sentinel)」プロジェクトを推進しており、軍事機密に触れることなく民間人が科学的に価値のあるデータを収集できる環境の実現を目指している。また、博士自身が海軍の運用中に遭遇した、既存の物理学では説明困難なUSOの目撃事例が、この研究の強力な動機となっている。
1. 専門的背景と個人的動機
Bob McGwier 博士の経歴は、高度な理論的知識と実用的な防衛技術の両面に及んでいる。
1.1 教育とキャリア
- 学術的背景: ブラウン大学で応用数学の博士号を取得。ノーベル賞受賞者のレオン・クーパーから量子場理論を、ロバート・セジウィックやドナルド・クヌースから計算機科学を学んだ。
- 実務経験: サンディア国立研究所での勤務を経て、ワイヤレス通信や衛星監視の分野で複数の企業を創設。
- ホークアイ360: 博士が共同創設したこの企業は、100基以上の衛星群を用いて地上の無線送信源を特定する。中国軍の国境付近での動きを察知しインド政府に警告するなど、インテリジェンス・コミュニティにおいて極めて重要な役割を果たしている。
1.2 未知の現象への遭遇
博士がこの分野に注力する背景には、海軍の作戦参加中に目撃した2つの重大な事例がある。
- 空母ブルーリッジでの事例(2008年): 台風下の日本海において、船体よりも巨大な発光する物体を目撃。その物体の直下だけは雨が降っておらず、物体が急上昇した直後に激しい雨が戻った。
- 原子力潜水艦ハンプトンでの事例(1990年代後半): 水中で音速(時速約760マイル)を超える速度で移動する「ファスト・ウォーカー(Fast Walker)」をソナーが検知。水は非圧縮性であるため、既知の人類技術では不可能な現象であった。
2. 次世代検知システム「ハイドロ・センチネル」
McGwier 博士は、USOを検知するための安価で高性能なシステムの設計図を公開している。
2.1 センサー構成と技術仕様
システムは、1,000ドル以下のコストで構築可能であることを目標としている。
| コンポーネント | 技術的詳細 | 目的 |
|---|---|---|
| パッシブ音響センサー | MEMS(マイクロ電気機械システム)マイク | 10Hzから100kHzまでの広帯域音響、超音波過渡現象の捕捉。 |
| 磁気ラジオメータ | PNI RM3100 | 強磁性体による地球磁場の乱れ(S字曲線確認)を検知。 |
| 演算ユニット | Orange Pi 5 Plus + Google Coral TPU | 毎秒8兆回の演算が可能なAI処理ユニット。現場でのリアルタイム推論。 |
| 通信・電源 | Starlink、ソーラーパネル、バッテリー | 遠隔地やブイでの長期運用、クラウドへのデータ送信。 |
2.2 検知戦略:大陸棚の活用
- 導波路効果: 水深の浅い大陸棚付近では、音が円筒状の波として伝播するため、深海よりも減衰しにくく、遠方の音を捉えやすい。
- フィルタリング: 大陸棚は高域通過フィルター(ハイパスフィルター)として機能し、低周波の推進ノイズを除去しつつ、金属的な異常音を際立たせる。
3. AIとデータ解析の役割
膨大なデータから有意な情報を抽出するため、エッジコンピューティングによるAI解析が導入されている。
- リアルタイム推論: Google Coral TPU(Tensor Processing Unit)を使用し、収集された音響データや磁気データをその場で分類する。
- 誤検知の排除: AIはエビやクジラの鳴き声、一般船舶のノイズを学習しており、これらを「関心外」として排除する。
- 航空機・衛星の照合: 博士が開発したコードは、既知の航空機(United Flight Tracker)や衛星(Visible Ephemeris)の軌道データと照合し、既知の物体を自動的に除外する機能を備えている。
4. 法的遵守とオープンサイエンス
本プロジェクトは、軍事機密(ITAR/ECCN)に抵触しないよう慎重に設計されている。
- 軍事機密の回避: センサーの感度を、潜伏中の原子力潜水艦(極めて低デシベル)を検知できないレベルに設定することで、当局からの介入を避けている。
- オープンソース: すべてのコードはGitHub上でMITライセンスの下で公開されている。これにより、世界中の科学者や愛好家が自由に技術を利用・改善できる。
- 透明性: 博士は「データの公開」を最優先しており、科学的価値を持たせるための厳格なプロトコルとメタデータの付与を推奨している。
5. 結論と今後の展望
Bob McGwier 博士の取り組みは、UAP/USO研究を単なる目撃証言の収集から、検証可能な科学的データの蓄積へと転換させるものである。博士は「科学的コミュニティの一員として、データを無料で提供し、議論の質を高めること」を自身の報酬としている。
今後は、SCU(Scientific Coalition for UAP Studies)などの組織と連携し、収集された異常データの詳細なレポートを公開していく予定である。また、このシステムは、カリフォルニア州のカタリナ島や五大湖など、USOの目撃例が多い「ホットスポット」での運用が期待されている。
重要な引用
「我々は原子力潜水艦を探しに行こうとしているのではない。そんなことをすれば、すぐに機器を没収され、機密扱いとして隠蔽されてしまうだろう。我々は法に抵触しない範囲で、有用なデータを得るために最善を尽くす。」
「私が書いたUAPおよびUSOに関するコードは、一行残らずMITライセンスでGitHub上に公開する。唯一の対価は『これは友人であるボブから得たものだ』というクレジットだけだ。」
「水中で音速を超えて移動する物体(ファスト・ウォーカー)の存在を、潜水艦のソナー室にいた全員が知っていた。しかし、誰も何も言わず、何事もなかったかのように振る舞った。それが当時のルールだった。」
海洋観測・USO検知ネットワーク「ハイドロ・センチネル」構築に関する技術提案書
1. 開発の背景とプロジェクトの戦略的意義
現代の海洋安全保障において、未確認水中物体(USO: Unidentified Submerged Objects)の検知は、国防および科学的探求の両面で喫緊の課題となっている。現在の軍事的な監視能力は、海峡や軍事基地周辺といった「戦略的優先区域(Strategic Priority Zones)」に特化しており、それ以外の広大な沿岸域や大陸棚周辺には、広大な「観測の空白」が存在している。例えば、カリフォルニア州カタリナ島周辺のように、頻繁にUSOの目撃が報告される海域であっても、常設の高度な監視網は整備されていないのが現状である。
本プロジェクト「ハイドロ・センチネル」は、この戦略的な空白を「分散型グラスルーツ(草の根)監視網」によって埋めることを目的とする。従来の軍用システムは、極秘の音響指紋(アコースティック・シグネチャ)を捉えるために数百万ドルの予算を投じるが、本提案はMEMS(微小電気機械システム)技術とエッジAIの進化を活用し、商用オフザシェルフ(COTS)部品を基盤とした圧倒的な低コスト・高密度ネットワークを構築する。これにより、軍事機密の壁に阻まれることなく、市民科学の枠組みで未知の水中現象を定量化し、人類共通の知的資産として蓄積するパラダイムシフトを実現する。
- システムアーキテクチャの設計思想
「ハイドロ・センチネル」の設計思想の核心は、民生品(COTS)の組み合わせにより「政府による過度な機密指定(Over-classification)」を無効化しつつ、軍用レベルの信号処理能力を確保することにある。AmazonやBest Buyで購入可能なハードウェアを採用することで、当局による技術の接収や輸出制限を回避しつつ、現場(エッジ)での計算オーバーヘッドを最小限に抑える設計となっている。
主要コンポーネントの選定理由は以下の通りである。
| コンポーネント | 主要スペック | 戦略的評価・選定理由 |
|---|---|---|
| Orange Pi 6 Plus | 高性能シングルボードコンピュータ (SBC) | 強力な処理能力により、4K映像、384kHz音響、100Hz磁気データのマルチモーダルな同時処理を可能にする。 |
| Google Coral TPU | 8 TOPS (8兆回/秒) / 消費電力5W未満 | 深層学習の推論を高速化。8ビット整数演算に特��化し、極めて低い電力枠で高度な分類アルゴリズムを現場で実行する。 |
| PNI RM3100 | 磁気ラジオメトリ・デバイス | 地球磁場の微細なベクトル変化を検知。強磁性体(Ferromagnetic signatures)の移動に伴う磁場勾配の歪みを捉える。 |
| MEMSハイドロフォン | 受動音響センサー (0〜100kHz) | 数千ドルの軍用機材に代わり「シチズン・モード」として動作。安価でありながら広帯域な信号捕捉を実現する。 |
3. 物理センシングの原理とUSO検知の論理的根拠
水中における物理現象の特性を理解することは、USOの「非自然的な挙動」を定義する上で不可欠である。本システムは、音響および磁気の二層解析により、目標の確実な捕捉を目指す。
3.1 受動音響観測と導波路効果
大陸棚(Continental Shelf)付近の浅瀬は、海面と海底が反射板として機能し、「円筒状導波路(Cylindrical Waveguide)」を形成する。この環境下では、深海と異なり音の減衰が抑えられ、遠方の信号が明瞭に伝播する。また、浅瀬は天然の「ハイパスフィルター」として機能�し、低周波の背景雑音を遮断する特性を持つ。これにより、USOが発する可能性のある金属的な異常音や過渡的なクリック音の信号対雑音比(SNR)を向上させることが可能となる。特に、水中では「水は非圧縮性である」という物理的制約から、既知の人工物が音速(約760mph以上)を超える移動をすれば激しいキャビテーションが発生する。本システムは、そのような「非キャビテーション状態での高速移動」という物理的矛盾を検知対象とする。
3.2 磁気ラジオメトリによるシグネチャ解析
水中を移動する目標が強磁性体(Ferromagnetic material)を含む場合、地球磁場に特有の歪みが生じる。センサー付近を通過する際に現れる「S字曲線(S-curve)」は、物体が物理的にそこに存在することの確証(物理的実体)を与える。本ネットワークでは、複数地点に配置されたユニット間の到達時間差(TDOA: Time Difference of Arrival)を利用し、目標の進入角度および角速度(Angular Velocity)を正確に算出する。これにより、音響のみでは困難な位置特定を補完し、科学的エビデンスとしての信頼性を高める。
4. エッジAI「インテリジェンス・パイプライン」の実装
海洋観測における最大のボトルネックは、膨大な生データの送信コストである。ハイドロ・センチネルは、現場で99%の不要データを破棄する「I don't care box(関心外データ処理)」思想に基づいたパイプラインを実装する。
「インテリジェンス・パイプライン」の処理フロー:
- データインジェスト: 384kHzオーディオと100Hz磁気データのリアルタイム取り込み。
- 時間同期リングバッファ: 複数センサー間の時間軸を完全に同期させ、後続の確率論的推論に備える。
- Google Coral TPUによる高速推論: 8ビット整数演算を用いた量子化済みモデルによる、ミリ秒単位の分類。
- 自動フィルタリング(I don't care box):
- 既知の自然音(テッポウエビのクリック音、クジラの鳴き声)や環境ノイズを自動的に棄却。
- 既知の人工音(船舶のスクリュー音、航空機ノイズ)を「不要」としてフィルタリング。
- 重要イベントの抽出: 分類アルゴリズムが「金属的異常」や「高G移動体」を検知した場合のみ、メタデータ(時刻、位置、確信度)と共に保存・送信。
この確率論的推論(Probabilistic Inference)プロセスの導入により、Starlink等の通信帯域を劇的に節約しつつ、科学的に価値のある「真の異常」のみを24時間監視することが可能となる。偽陽性(Type I error)と偽陰性(Type II error)のバランスは、継続的な学習モデルの更新により最適化される。
5. 法的コンプライアンスとオープンソース・エコシステム
本プロジェクトの持続可能性を支えるのは、軍事機密(ITAR/EAR)との戦略的な距離感である。
5.1 規制回避の論理
軍用の高性能センサーは、極秘の原子力潜水艦を検知できる能力を持つがゆえに厳格な輸出規制を受ける。ハイドロ・センチネルは、あえてその感度を「軍用潜水艦のノイズフロアよりも50〜60dB高いレベル」に設計段階で制限している。この「意図的な性能抑制」により、軍事機密の侵害を回避しつつ、法的にクリーンな状態でグローバルな展開を可能にしている。
5.2 MITライセンスによる科学的透明性
システムのソースコードはすべてGitHub上でMITライセンスの下で公開される。
- 科学的整合性の担保: アルゴリズムをオープンにすることで、ピアレビューに耐えうるデータの透明性を確保する。
- 分類の共同進化: 世界中の開発者がアダプティブ・フィルタリング等の機能拡張に参加し、検知精度の向上を加速させる。
- 不可侵な知的資産: 誰でも安価に構築できるオープンソースとすることで、政府による技術の独占や情報の隠蔽を構造的に不可能にする。
6. 結言:海洋観測の民主化と未来への展望
「ハイドロ・センチネル」は、軍事組織や国家が独占してきた海洋監視能力を、科学者と市民の手へと取り戻す「海洋観測の民主化」の旗手である。「低コストなCOTS部品の戦略的活用」「エッジAIによる高度な情報抽出」「法的境界線の厳守」という3つの柱により、USO研究は憶測の域を脱し、検証可能な科学へと昇華される。
私たちは投資家および研究機関に対し、この分散型メッシュネットワークへの参画を呼びかける。ハイドロ・センチネルが生成する高精度なデータセットは、海洋における未知の物理現象を解明するための人類共通の知的資産となり、地球最後の��フロンティアである海洋の真の姿を明らかにする鍵となるであろう。
技術評価報告書:民間主導型UAP/USO検知システムの技術検証と規制遵守
1. はじめに:民間によるUAP/USO検知の戦略的意義
現代の安全保障環境において、未確認異常現象(UAP)��および未確認潜水物体(USO)の追跡は、国家機関が主導する「脅威ベース(Threat-based)」の監視に依存してきた。しかし、機密保持に伴う情報の断絶や収集バイアスは、科学的な解明を阻む最大の要因となっている。これに対し、応用数学および信号処理の専門家である Bob McGwier 博士(Dr. Bob Maguire)が提唱する「ハイドロ・センチネル(Hydro Sentinel)」プロジェクトは、市民科学による「現象学的(Phenomenological)」なアプローチを提示している。
本プロジェクトの戦略的意義は、オープンソースのハードウェアと高度な信号処理アルゴリズムを融合させ、軍事機密の枠組みを超えた透明性の高い海洋監視ネットワークを構築することにある。従来の政府主導モデルが情報の「秘匿」を前提とするのに対し、本モデルはデータの「民主化」を軸としており、市民科学による広域かつ継続的なデータ収集が、結果として国家安全保障の盲点を補完する相補的なインテリジェンス資産として機能する点に、その差別化要因が存在する。
2. システムアーキテクチャとセンサー技術の評価
「ハイドロ・センチネル」のシステム構成は、単一ボードコンピュータ(SBC)であるOrange Pi 5 Plusをホストとし、PCIeインターフェースを介した高速データ処理基盤を構築している。低コストな民生用コンポーネントを採用しなが�らも、物理学的特性を最大限に活用することで、軍事用システムに匹敵する特定の検知能力を実現している。
主要センサーコンポーネントと物理的仕様
| センサー種類 | 具体的なデバイス/技術 | 主要機能・サンプリングレート | データレート/帯域幅 | 選定理由と実用性 |
|---|---|---|---|---|
| 受動音響 (Passive Acoustic) | MEMSマイクロフォン | 10Hz ~ 100kHz をカバー | 384kHz サンプリング | ナイキスト周波数を考慮した384kHzサンプリングにより、標準的な44.1/48kHzでは不可視な100kHzまでの超音波過渡現象を捕捉可能。 |
| 磁気放射計 (Magnetic Radiometry) | PNI RM3100 | 地磁気摂動の検出(100Hz) | ベクトル場勾配測定 | 強磁性体の移動に伴う磁場変化をSカーブとして検出し、対象の近接性と角速度を物理的に算出。 |
分析:円筒状導波管効果(Cylindrical Waveguide Effect)とSNRの最適化
本システムは、大陸棚等の浅瀬における「円筒状導波管効果」を信号伝搬の優位性として利用している。浅瀬は物理的な「ハイパスフィルター」として機能し、遠距離の潜水艦等が発する低周波の推進ノイズを自然に減衰させる。一方で、USOに特有とされる高周波のクリック音や金属的な過渡現象は、海面と海底の反射によってエネルギーが封じ込められ、長距離にわたって高い信号対雑音比(SNR)を維持したまま伝播する。この環境特性を利用した「プリプロセッシング」により、計算負荷を抑えつつ特異信号の抽出効率を高めている。
また、磁気センサーによる「Sカーブ」の検出は、単なる存在検知に留まらず、磁場勾配のベクトル解析を通じて対象の近接距離と相対速度の推定を可能にする。これは、音響データと組み合わせることで、多角的な事象照合(Cross-validation)を実現する。
3. エッジAIと信号分類の効率性分析:Google Coral TPUの活用
膨大なリアルタイム・ストリーミングデータから有意な異常値を抽出するため、本システムはGoogle Coral Dual-Edge TPUを採用している。これは5ワット未満の消費電力で8 TOPS(毎秒8兆回演算)という圧倒的な計算効率を誇り、洋上ブイ等の電力制限環境下での運用を可能にしている。
信号分類と8ビット量子化の妥当性
AIモデルのデプロイメントにおいては、以下の最適化手法が適用されている。
- 8ビット量子化(8-bit Arithmetic): 32ビット浮動小数点演算から8ビット整数演算への量子化により、計算リソースの最適化と推論速度の高速化を実現。音声信号の完全な再現ではなく「分類(Classification)」を主目的とする場合、この量子化は精度の有意な低下を招くことなく、十分な分類性能を担保できる。
- 環境ノイズの排除(Signal Classification):
- 海洋生物(テッポウエビのクリック音、クジラの鳴き声)の識別。
- 一般船舶のエンジン音およびキャビテーションノイズの統計的除外。
- トランスフォーマーモデルを用いた、非線形な過渡信号(Transient signals)のパターン認識。
技術的評価:計算オーバーヘッドの低減
低整数演算ユニットの使用は、高ダイナミックレンジが必要な一部の信号処理には制約となるが、エッジ側で「関心領域(Region of Interest)」を特定し、メタデータのみを送信する本システムの設計思想においては、通信帯域と電力消費のトレードオフを最適化する最良の選択といえる。
4. 安全保障規制(ITAR/ECCN)への適合性検証
民間主導の海洋監視において最大の法的リスクは、軍事用潜水艦の検知能力が国家機密(ITAR等)に抵触することである。ハイドロ・センチネルは、物理的な設計段階で「意図的な性能制限」を設けることにより、この規制リスクを回避している。
「グリーンライン(Green Line)」戦略と法的シールド
本システムは、以下の技術的根拠に基づき、ECCN(輸出管理分類番号)EAR99(ライセンス不要)でのグローバル展開を目指している。
- 感度閾値の物理的制限: システムのノイズフロアを海洋の背景雑音(Ambient Noise Floor)より50〜60dB高く設定。この「バッファ」により、極めて静粛性の高い原子力潜水艦等の軍事資産を検知する能力を物理的に排除している。
- 規制回避のメカニズム: 軍事用ハイドロフォン(数万ドル級)をあえて使用せず、MEMS技術を用いることで、「機密扱いの軍事技術」という定義から法的に外れる「グリーンライン」を維持している。
この戦略的適合性により、政府当局による装置の没収や機密指定のリスクを最小化(Regulatory Risk Mitigation)し、市民による自由な科学調査を可能にしている。
5. オープンソースモデルが国家安全保障と市民科学に与える影響
本プロジェクトはMITライセンスに基づき、GitHub上でコードを完全公開している。この「データの民主化」は、先行するHawkeye 360が民間のSIGINT(信号インテリジェンス)を用いて中国軍の国境移動や違法漁業を特定した事例と同様、民間インテリジェンスが国家安全保障を補完し得ることを示唆している。
「I don't care box(無関心ボックス)」による認知的負荷の軽減
オープンソースの追跡プラットフォーム(航空機、衛星、一般船舶)と連携することで、既知の物体を「I don't care box」へ自動的に排除する。これにより、宇宙軍(Space Force)等の国家機関が膨大なデータの中から真に分析すべき「説明不可能な異常値」に集中できる環境を提供し、組織的な情報処理のボトルネックを解消する。市民科学によるデータ蓄積は、当局にとっての「認知過負荷」を軽減するフィルタリング・レイヤーとして機能する。
6. 総括と今後の展望
本技術評価報告書に基づき、「ハイドロ・センチネル」は技術的および法的観点から極めて高い妥当性を有すると結論付ける。
- 経済的合理性と拡張性: 300ドルから500ドル程度の民生デバイス構成でありながら、エッジAIと環境物理特性(導波管効果)の活用により、実効性の高い監視網の構築が可能である。
- 規制遵守の堅牢性: ITARを回避しECCN準拠を維持する「グリーンライン」戦略は、グローバルな市民科学ネットワークの展開において不可欠な法的基盤である。
本システムは、UAP/USO研究を愛好家の領域から、低コストかつ高精度な「実証的科学(Empirical Science)」へと昇華させる技術的マイルストーンである。今後は定常的な観測ネットワークの構築を通じて、海洋における未知の物理現象に対する透明性の高いデータ提供が期待される。
水中の未知を解き明かす:低コスト・高性能探知システム「ハイドロ・センチネル」の仕組み
1. イントロダクション:なぜ今、水中探知が必要なのか
地球の表面の約70%を占める海洋。しかし、私たちは火星の表面よりも、自分たちの足元に広がる水中の世界について詳しく知りません。近年、空での未確認空中現象(UAP)が注目を集めていますが、それらが海中へ消えたり、海中から現れたりする「未確認水中物体(USO)」の存在も、科学的な無視できない関心の的となってい�ます。
応用数学と信号処理の権威である Bob McGwier 博士(Bob Maguire)が提唱する「ハイドロ・センチネル(Hydro Sentinel)」プロジェクトは、これまで軍や政府の独占領域だった水中探知を、市民の手へと開放しようとする野心的な試みです。博士はこのプロジェクトを通じて、科学的なデータを収集・分析し、SCU(Scientific Coalition for UAP Studies:UAP科学連合)への正式な報告書を作成することで、この分野の学術的な地位を確立することを目指しています。
本プロジェクトのミッション
- 情報の民主化: 数十億円もする軍用センサーに頼るのではなく、誰でも手の届く総額500ドル程度のデバイスで、科学的価値のあるデータを収集する。
- 透明性の確保: 収集したデータをオープンソース化し、世界中の研究者が検証可能な「レシート(証拠)」を提示する。
- 未知の解明: 物理法則を無視した動きを見せる物体の挙動を、音響と磁気の両面から定量的に評価する。
🎓 本ドキュメントの学習ロードマップ
- 音の科学: 浅瀬特有の「波導現象」がなぜ遠距離探知に有利なのか。
- 磁気の視覚化: 「Sカーブ」を用いて物体の速度や角度を追い詰める仕組み。
- ハードウェアの革新: 民生用部品(MEMSやTPU)が軍用レベルの成果を出せる戦略的理由。
- AIの知能: 毎秒8兆回の演算で「真の異常」を仕分けるエッジ計算。
水中での探知を可能にするための第一の鍵は、広範囲をカバーする「音」の科学にあります。
2. 水中の「音」を捉える:波導現象(Waveguide)の魔法
水中での探知において、最も重要な手段は「音」です。しかし、深海と浅瀬(大陸棚)では、音の伝わり方が物理的に劇的に異なります。ハイドロ・センチネルは、この「浅瀬の特性」を最大限に利用するように設計されています。
深海 vs 浅瀬:音の伝搬特性
| 特徴 | 深海(外洋) | 浅瀬(大陸棚) |
|---|---|---|
| 波の形状 | 球面波: 四方八方に広がる | 円筒波: 海面と海底に反射し、筒状に広がる |
| エネルギーの減衰 | 非常に早い(距離の2乗に反比例) | 緩やか(距離に比例して弱まる) |
| 伝達距離 | 短い | 非常に長い(エネルギーが逃げない) |
| ノイズ特性 | あらゆる周波数が混在 | 低周波がカットされる(ハイパスフィルター効果) |
物理学的な「なぜ?」: 通常、音のエネルギーは距離の2乗(逆2乗の法則)で減衰しますが、浅瀬では海面と海底が「壁」の役割を果たします。これにより、エネルギーが上下に逃げず、まるで長いパイプ(波導管:ウェーブガイド)の中を通るように、エネルギー損失が線形(距離に比例)に抑えられ、遠くまでクリアに音が届くのです。
さらに、浅瀬は天然の「ハイパスフィルター」として機能します。船のエンジン音などの不要な低周波ノイズが自然に削ぎ落とされる一方で、未知の物体が発する鋭いクリック音や金属音(高周波)は鮮明に残るため、探知には絶好の環境となります。
音響が長距離の「警告」を担う一方で、近距離まで追い詰めた物体の物理的実在を確認するには、第二の鍵である「磁気」の力が必要になります。
3. 磁気の乱れを可視化する:Sカーブ(S-curve)の正体
音に加えて活用するのが、「磁気ラジオメトリ(磁気勾配測定)」です。これは、物体が持つ磁気的な性質を利用して、その動きを数値化する技術です。
「Sカーブ」による物体特定
鉄などの強磁�性体を含んだ物体がセンサー付近を通過すると、地球の磁場にわずかな乱れが生じます。この際、センサーは磁場そのものではなく、磁場の「勾配(変化率)」を測定します。金属探知機がコインの真上で最も大きな音を出すように、物体がセンサーを横切る瞬間、磁場の強さが反転し、グラフ上にアルファベットの「S」のような波形(Sカーブ)が描かれます。
Sカーブが描く物体の動き(ステップ):
- 接近: 物体が近づくにつれ、磁場の勾配が急激に立ち上がる。
- 通過(反転): 物体がセンサーの最近接点を通過する瞬間、磁場強度の変化率がピークに達し、一気に反対方向へ「フリップ」する。
- 遠ざかる: 変化率が徐々に収束し、特徴的なS字が完成する。
複数のセンサーを一定間隔で配置することで、単に「何かが通った」ことだけでなく、その物体の「進入角度」や、移動の激しさを示す「角速度」まで正確に算出できます。
物理現象の原理を理解したところで、これらを驚くほど安価に実現する「ハードウェアの革新」について見ていきましょう。
4. 破壊的イノベーション:安価なセンサーが軍用レベルを超える理由
これまでの水中探知には、数千ドルから数万ドルもする軍事用ハイドロフォンが必要でした。しかし、ハイドロ・センチネルは、最新の民生用テクノロジーを組み合わせることで「低コストかつ高性能」を両立させます。
採用されている主要ハードウェア
- MEMSマイクロフォン: スマートフォンにも使われている超小型センサー。わずか100ドル以下のコストで、384kHzのサンプリングレートに対応し、100kHzまでの超音波帯域を捉える能力を持ちます。
- PNI RM3100: 数百ドルで購入可能な高精度磁力計。100Hzのサンプリングで、軍用レベルに匹敵する微細な磁場変化を検出します。
戦略的な「低感度」のメリット
ハイドロ・センチネルは、あえて軍用潜水艦が発する極めて微弱な音(環境ノイズのさらに50-60dB下)を拾わないように設計されています。これには、技術的・法的な戦略意図があります。
軍用システム vs ハイドロ・センチネル 比較チェックリスト
| 比較項目 | 従来の軍用システム | ハイドロ・センチネル |
|---|---|---|
| トータルコスト | 1ユニット数百万円〜 | 約500ドル(約7.5万円) |
| 法的規制 | ITAR/ECCN(国外持ち出し禁止) | 対象外(世界中で運用可能) |
| 主な標的 | 静粛性の極めて高い軍用潜水艦 | 高エネルギー・高速の未知物体(USO) |
| データの透明性 | 最高機密(非公開) | オープンソース(全員に共有) |
このように、あえて「超高感度」を捨てることで、法的リスクを回避しながら、高速で移動する高エネルギーのUSOを効率的に探知する「市民の目」として機能します。
膨大な生データから「真の異常」を瞬時に見つけ出すには、現場で判断を下す「AIの頭脳」が欠かせません。
5. エッジAIによる知能化:Google Coral TPUと推論の力
384kHzの音響デ��ータと100Hzの磁気データを常に収集し続けると、膨大なデータ量になります。これをすべてクラウドに送ることは、ブイのような独立したユニットでは不可能です。そこで、水中ユニット内部で計算を完結させる「エッジAI」が必要になります。
8兆回の演算をわずか5ワットで
ハイドロ・センチネルの頭脳には、Google Coral Dual Edge TPU(約80ドル)が採用されています。
- 処理能力: 毎秒8兆回(8 TOPS)の演算能力。
- 電力効率: 消費電力は5ワット以下。太陽光パネルでの長期運用に最適。
- 量子化技術: 重いモデルを「8ビット演算(8-bit arithmetic)」に軽量化することで、低電力で高速な推論を実現。
インテリジェンス・パイプライン
推論(Inference)は確率的なプロセスです。AIは「クジラ」や「エビのクリック音」を確率的に分類し、異常値のみを抽出します。
エッジAIによる推論フロー(概念)
while True: audio_sig = sensors.audio.capture(384000) # 384kHzの高精度サンプリング mag_sig = sensors.mag.capture(100) # 100Hzの磁気勾配
TPUによる確率的推論(8ビット量子化モデル)
分類結果の確信度が閾値(例:90%)を超えた場合のみ検知
prediction = tpu_model.infer(audio_sig, mag_sig)
if prediction.label == "UNKNOWN_ANOMALY" and prediction.probability > 0.9:
重要な異常データのみをメタデータと共に保存
storage.save(data, timestamp, location, tags="Anomalous")
Starlinkなどの低速回線を通じてアラートを送信
cloud.send_alert(prediction.metadata) else:
環境音(エビ、船、鯨)はノイズとして破棄
discard(data)
この技術がもたらす未来は、単なる監視の自動化に留まりません。それは、オープンソースによる「草の根の科学革命」へと繋がっています。
6. 結論:草の根からの科学革命
Bob McGwier 博士の哲学は、「知の共有(MITライセンスによるGitHub公開)」にあります。
軍や政府が情報を隠蔽していると嘆くのではなく、一般市民が安価なツールを手に取り、自ら科学的なデータを集めて公開する。博士が開発しているフィルタリングやレーダー追跡のコードはすべてGitHubで公開されており、誰でも利用可能です。この透明性こそが、UAP/USO研究を「憶測」から「科学」へと押し上げる唯一の道なのです。
あなたも参加できる未来
このプロジェクトは、沿岸�部に住む人々、ボートの所有者、そして科学を愛するすべての人が参加できるプラットフォームです。
- GitHubでリポジトリを確認: 博士のAdaptive filteringやPassive radarのコードを学習・利用する。
- 最新動向をフォロー: X (旧Twitter) の @sciencebob 等で、開発の進捗やSCUへの報告状況をチェックする。
- 環境を武器にする: 浅瀬の「波導現象」と「自然フィルター」により、低コストなセンサーでも広範囲の異常音を探知できる。
- 物理的なレシート: 磁気の「Sカーブ」を多点で捉えることで、物体の速度や角度といった物理的な裏付けを科学的に算出できる。
- 民主化されたAI: 500ドル程度の民生品(MEMSとDual Edge TPU)の組み合わせにより、法的規制を回避しつつ、軍用レベルの知能を市民が手にできる。
インテリジェンス・パイプライン:センサーデータから真実を導き出す仕組み
1. はじめに:なぜ「インテリジェンス・パイプライン」が必要なのか
主任システムエンジニアとして、まず断言しておきましょう。センサーが捉えただけの「生のデータ」には、それ自体に価値はありません。それは広大な砂漠に散らばる砂粒のようなものです。何万時間もの水中音響や、微細な磁気変動の記録を人間がすべて精査して「未知の物体(USO/UAP)」を見つけ出すことは、物理的に不可能です。
私たちが構築すべきは、膨大なノイズの海から真に注目すべき「真実」を自動的に抽出する一連の仕組み、すなわちインテリジェンス・パイプラインです。
インテリジェンス・パイプラインの定義
「センサー群が捉えた断片的かつ膨大な生データを、収集・同期・分類のステップを経て、科学的に検証可能な価値ある情報(インテリジェンス)へと変換する、自律的なデータ処理アーキテクチャ」
このパイプラインを理解することは、単なるプログラミングを学ぶことではありません。混沌とした世界から、いかにして「意味」を取り出すかという設計思想を学ぶことです。では、その入り口となる、データを流し込むための「感覚器」――センサーの選定から見ていきましょう。
2. ステップ1:インジェクション(データの取り込みと戦略的センサー選定)
パイプラインの第1段階は「インジェクション(注入)」です。ここでは、水中を移動する物体を捕捉するために、性質の異なる2つのセンサーを組み合わせます。
エンジニアリング上の重要な戦略は、あえて「軍事グレード」を避けることにあります。1万ドルもする軍用ハイドロフォン(水中マイク)を使用すれば、核潜水艦の微細な音まで拾えるかもしれませんが、それは同時にITAR(武器国際取引に関する規則)やEAR(輸出管理規則)に抵触し、政府による機器の没収や機密指定のリスクを招きます。
私たちが採用するのは、ECCN(輸出管理分類番号)に準拠した「シチズン・モード(市民科学仕様)」の構成です。意図的に感度を調整し、潜水艦を検知できないレベルに抑えることで、法的制約を回避しながら科学的調査を継続可能にしています。
| 項目 | 音響センサー (MEMS Microphones) | 磁気センサー (PNI RM3100) |
|---|---|---|
| 測定対象 | 水中の音波(振動) | 地磁気の歪み(磁気ベクトル場) |
| 破壊的技術 | スマホにも使われる安価なMEMS技術 | 高精度な磁気計測(グラジオメトリ) |
| サンプリングレート | 384,000 samples/sec (384kHz) | 100 samples/sec (100Hz) |
| 役割 | 超音波の過渡応答や低域の轟音を聴く | 金属物体の通過による磁気変化を追う |
収集されたデータは、この時点ではまだ「バラバラの周波数を持つ断片」に過ぎません。これらに命を吹き込むには、時間軸の統合が必要です。
3. ステップ2:同期と整理(リングバッファの魔法)
ここに大きなエンジニアリング・チャレンジがあります。秒間384,000個のデータが流れる音響データと、わずか100個の磁気データを、どうやって「同じ瞬間」のものとして扱うか。このデータレートの圧倒的な乖離を解決するのが、�「リングバッファ」を用いた同期処理です。
データが同期されていない場合のリスク:
- データのドリフト: 磁気の異常を検知したとき、それが「どの音」と対応しているのかがミリ秒単位でズレ、因果関係を証明できなくなる。
- 科学的妥当性の喪失: 時間軸が曖昧なデータは、専門家による査読に耐えうる「証拠」にはなり得ない。
データが同期されていることによるメリット:
- 精密なタイムスタンプ: 全センサーのデータを共通の時間軸上に配置し、物体の移動速度や角度を正確に算出できる。
- マルチモーダル分析: 音と磁気の変化を同時に相関分析することで、単一センサーでは見逃すような微弱な信号を「有意なイベント」として捉えることが可能。
整理され、足並みを揃えたデータは、いよいよパイプラインの「脳」であるAIへと送り込まれます。
4. ステップ3:AIによる推論(�ノイズから物体を識別する)
AIの真の任務は「興味のないデータを捨てること」です。私たちはこれを「I don't care box(どうでもいい箱)」への仕分けと呼んでいます。
まず、浅瀬などの環境では「天然のハイパスフィルタ」の働きにより、低周波の雑音が自然に減衰します。その上で、AIが高度な分類(Classification)アルゴリズムを実行します。
- ノイズの排除: 数十億のテッポウエビのクリック音、クジラの歌、船舶のエンジン音。これらをAIが「既知の事象」として識別し、無視します。
- 未知の抽出: 既知のパターンに当てはまらない、金属的な異常信号や物理法則を超えた動きを「興味深いイベント」として抽出します。
AIが判断を下す際の「推論の確率的性質」に関する3つの重要ポイント:
- 推論は完璧ではない: AIの判断は常に確率的です(例:「95%の確率で未知の物体」)。
- エラー率の最適化: 「価値あるものを見逃す確率(偽陰性)」と「ゴミを宝物と見間違える確率(偽陽性)」のバランスを、学習によって極限まで調整します。
- 分類の精度: 90%以上の精度でノイズを除去できれば、人間の解析コストを劇的に削減できる「勝利」といえます。
5. パイプ�ラインを支える心臓部:TPUとエッジコンピューティング
この膨大なリアルタイム計算を支えるのが、驚異的な処理能力を持つエッジAIデバイスです。本システムでは、Googleの「Dual Edge Coral TPU」をPCIeインターフェースで接続して採用しています。
Google Coral TPU の技術的優位性
- 演算能力: 毎秒8兆回(8 TOPS)の演算を実行。
- 電力効率: 5ワット未満という、電球1個分以下の低消費電力。
- 8ビット整数量子化: 巨大な学習モデルを「8-bit integer quantization」によって最適化。これにより、スーパーコンピュータ級の処理を現場(ブイや小型ボート)のシングルボードコンピュータ上で実現します。
このハードウェアがあるからこそ、クラウドに頼ることなく、現場(エッジ)で即座に「これは重要だ」という判断を下せるのです。
6. ステップ4:アウトプット(ストレージとメタデータ)
AIが「重要」と判断した瞬間、それは単なるデータから「記録」へと昇華されます。
- メタデータの刻印: 正確な発生時刻、GPSによる位置情報、使用デバイスの個体識別情報、およびAIの推論スコアを付与します。
- 重要イベントの抽出: 24時間の全生データではなく、AIが厳選した「1%の核心部分」のみをパッケージ化します。
- 帯域の最適化: Starlinkなどの衛星通信や低速なリンクを通じ、限られた帯域でも確実に研究者の元へ「真実」を届けます。
結論:オープンソースがつなぐ科学の未来
このインテリジェンス・パイプラインの最も重要な特徴は、そのすべてがオープンソース(MITライセンス)としてGitHubで公開されていることです。
「科学的発見を、一部の特権層からすべての人々の手に」 私たちは今、単なる憶測の時代から、データに基づいた科学の時代へと移行しています。このシステムは、国境や組織を越えた協力のためのプラットフォームです。あなたが構築するパイプラインが、人類がまだ目にしたことのない「真実」を捉える最初の一歩となるでしょう。
理解度チェック:パイプラインの4ステップ
- インジェクション: 音響(MEMS)と磁気(RM3100)を「シチズン・モード」で収集。
- 同期: リングバッファで異なるデータレート(384kHz vs 100Hz)を統合。
- 推論(AI): 8ビット量子化モデルで「興味のないノイズ」を排除。
- アウトプット: メタデータを付与し、重要なイベントのみを確実に保存・送信。
以下、mind map から生成
ゲスト : Bob McGuire
提供されたソースに基づき、リアルセンサーによるUFO/UAPおよびUSO(未確認潜水物体)の追跡という文脈において、ゲストの Bob McGwier (Bob McGuire)氏について説明します。
McGwier 氏は、単なる目撃者や愛好家ではなく、国家安全保障レベルの信号処理と応用数学の専門知識を持つ科学者として紹介されており、この分野を「推測」から「科学的データ収集」へと移行させようとしています。
彼に関する重要なポイントは以下の通りです。
1. 専門的背景と信頼性
McGwier 氏は数十年にわたる応用数学、信号処理、データ分析の経験を持っています。ブラウン大学で応用数学の博士号を取得し、サンディア国立研究所で勤務した経歴を持ちます。また、彼は通信会社Federated Wirelessや、衛星を利用して地上送信機を特定する企業Hawkeye 360(評価額15億ドル規模)の創設者でもあり、技術開発において非常に高い実績を持っています,,。
2. センサーシステム「Hydro Sentinel」の開発
McGwier 氏は現在、一般市民が利用可能な安価で高性能なUAP/USO検知システムの構築に取り組んでいます。このシステムは以下の技術的特徴を持っています。
- マルチモーダル・センサー:
- パッシブ音響(聴音): MEMSマイクを使用して、水中音(最大100kHz程度まで)を拾います,。
- 磁気ラジオメトリ: 地磁気の乱れを検知する磁力計(PNI RM3100)を使用し、金属物体が通過した際の磁気異常(S字曲線のシグナル)を捉えます,,。
- AIによる推論と分類:
- 収集したデータは、小型コンピュータ(Orange Piなど)上のTPU(Tensor Processing Unit)を用いたAIモデルによって処理されます,。
- AIはノイズ(エビの音など)を除外し、「興味深い」イベントのみを分類・保存するようにトレーニングされます,。
3. 「浅瀬」での戦略的運用
彼は、深海ではなく大陸棚や沿岸部(浅瀬)での運用を想定しています。これには物理学的および法的な理由があります。
- 物理的理由: 大陸棚が円筒状の導波管の役割を果たし、音が遠くまで届きやすくなるため。
- 法的・軍事的理由: 深海の原子力潜水艦を探知できるような軍事レベルの技術(ITAR規制対象)を避けるためです。浅瀬に限定し、環境ノイズレベルを利用することで、軍事機密に触れることなく合法的に「市民モード」でのデータ収集が可能になります,,。
4. オープンソースと民主化
McGwier 氏のこのプロジェクトの最大の特徴は、すべてのコードとデータをMITライセンス(誰でも自由に使用可能)でGitHubに公開している点です,。 彼は、高価な軍事用機器ではなく、数万円程度(システム全体で1000ドル以下を目指す)の機材で一般市民(ボート所有者など)が科学的なデータ収集に参加できる「草の根」ネットワークの構築を目指しています,。
5. 個人的な動機
彼がこの分野に情熱を注ぐ背景には、自身の海軍関連の作戦中の体験があります。
- USSハンプトン(原子力潜水艦)での体験: 1990年代後半、ソナー担当者が「ファスト・ウォーカー(Fast Walker)」と呼ぶ、音速以上の速度で水中を移動する物体に遭遇しました。
- USSブルーリッジでの体験: 2008年の台風の中、雨が降っていない「台風の目」のような空間を作り出し、発光して上昇していく巨大な物体を目撃しました。
要約すると、 Bob McGwier 氏は、自身の高度な技術的背景と実体験に基づき、「推測」ではなく「安価で合法的なリアルセンサーとAI」を用いて、一般市民の手でUAP/USOの物理的証拠を捉えるためのシステムを構築・提供しようとしている人物です。
水中物体(USO)検出システム : Hydro Sentinel
提供されたソースおよびこれまでの会話に基づき、 Bob McGwier 氏が開発中の水中物体(USO)検出システム「Hydro Sentinel(ハイドロ・センチネル)」について説明します。
このシステムは、リアルセンサーによる追跡という文脈において、「安価で合法的な技術を用い、一般市民が科学的なデータ収集に参加できる自律型観測装置」として位置づけられています。
具体的には以下の要素で構成されています。
1. 検出技術:音響と磁気のハイブリッド
Hydro Sentinelは、主に2種類のセンサーを組み合わせて物理的証拠を捉えようとしています。
- パッシブ音響(聴音): スマートフォンなどにも使われる安価なMEMSマイク技術を使用し、10Hzから100kHzまでの音を拾います。これにより、推進音や過渡的なクリック音、金属的な異常音を捉えることを目指しています。
- 磁気ラジオメトリ(磁気測定): 「PNI RM3100」という磁力計を使用し、地磁気の乱れを�検知します。強磁性体(鉄などを含む物体)がセンサーの近くを通過すると、磁場に「S字カーブ」と呼ばれる特徴的な反応が現れ、これによって物体の接近や角度、速度などを推定します。
2. データ処理:AIによる「エッジ」コンピューティング
単にデータを記録するだけでなく、その場でAIが判断を行う高度な処理能力を持たせています。
- AIによる推論(Inference): GoogleのTPU(Tensor Processing Unit)を搭載した小型コンピュータ(Orange Pi 6 Plusなど)を使用し、収集したデータに対してリアルタイムで機械学習モデルを適用します。
- ノイズの除去: AIは「エビのクリック音」のような生物学的ノイズや環境ノイズを識別して除外し、「興味深い」イベントだけを選別して保存・送信するようにトレーニングされます。
- タイムスタンプと同期: 音響データと磁気データをリングバッファに入れて時間を同期させ、後から科学的な検証に耐えうるデータパッケージを作成します。
3. 戦略的な運用場所:「浅瀬(大陸棚)」
McGwier 氏は、このシステムを深海ではなく浅瀬(大陸棚や沿岸部)に展開することを強調しています。これには明確な理由があります。
- 物理学的利点: 浅瀬は「円筒状の導波管」のように機能するため、深海よりも音が遠くまで伝わりやすいという特性を利用しています。
- 法的・安全保障上の配慮: 深海で原子力潜水艦を探知できるようなシステムを作ると、軍事技術規制(ITAR)に抵触し、政府に差し止められるリスクがあります。浅瀬に限定し、またMEMSマイクの感度限界を利用することで、軍事用潜水艦を探知できない(=政府に脅威とみなされない)「市民モード」での運用を可能にしています。
4. コストとオープンソース戦略
このプロジェクトの核心は、誰でも参加できる「草の根」ネットワークの構築です。
- 低コスト: システム全体のコストは1,000ドル以下(約15万円以下)を目指しており、ボート所有者や沿岸の住民が手軽に設置できるように設計されています。
- 完全オープンソース: すべてのコードと設計はMITライセンスの下でGitHubに公開され、誰でも自由に使用・改良できます。 McGwier 氏は、自身のコンサルティング時間を削ってこの開発を無償で行っています。
- 設置の柔軟性: ブイやロブスターの罠などに設置し、ソーラーパネルとバッテリーで長期間自律稼働させることが可能です。
要するに、Hydro Sentinelは、「高価な軍事用ソナーを使わずに、市販の技術とAIを駆使して、合法かつ科学的にUSOを待ち伏せするシステム」と言えます。
AI とデータ処理
提供されたソースおよびこれまでの会話に基づき、リアルセンサーによるUFO/UAPおよびUSOの追跡という文脈において、 Bob McGwier 氏が提唱する人工知能(AI)とデータ処理の役割について説明します。
McGwier 氏のアプローチの核心は、膨大な生データをすべて人間が分析するのではなく、「エッジ(現場のデバイス)」上でAIによる即時のデータ選別��(推論)を行うことにあります。
主なポイントは以下の通りです。
1. 「インテリジェンス・パイプライン」の構築
データ処理の流れは、単なる録音・録画ではなく、科学的な検証に耐えうるよう厳密に設計されています。
- 同期とバッファリング: マイクからの音響データ(最大384kHz)と磁力計のデータ(100Hz)は、まず「リングバッファ」と呼ばれるメモリ領域に送られ、正確に時刻同期(タイムシンクロナイズ)されます。これにより、音がした瞬間に磁気異常があったかどうかを正確に照合できます。
- スペクトル分析: ニューラルネットワークに入力する前に、生の波形に対してスペクトル分析(周波数解析)を行うプロセスが含まれる予定です。
2. エッジAIによる「推論(Inference)」と分類
システムには、Google製の「Coral Dual Edge TPU(Tensor Processing Unit)」というAI専用プロセッサが搭載されています,。
- 推論の実行: 小型コンピュータ(Orange Pi 6 Plusなど)上で、このTPUが毎秒数兆回の演算を行い、リアルタイムでデータを解析します,。
- ノイズの除去と分類: AIは、収集された信号が「クジラ」や「エビ(のクリック音)」などの生物学的ノイズなのか、それとも「興味深い異常」なのかを分類(クラシフィケーション)するようにトレーニングされます,。
- 確率的判断: 推論は確率的なプロセスであり、AIは「不要なデータを捨てる」確率と「重要なデータを保持する」確率のバランスを取るよう調整されます。これにより、人間は何時間もの無意味な録音を聞く必要がなくなります。
3. ハードウェアと効率性
- 低消費電力: 使用されるTPUは非常に高性能でありながら、消費電力は5ワット未満です。これは、ソーラーパネルとバッテリーで長期間自律稼働させるシステムにとって不可欠な要素です。
- 8ビット演算: 効率を高めるため、AIモデルは巨大な浮動小数点数ではなく、8ビットの整数演算(量子化されたモデル)を使用するよう調整されています。
4. データの保存と送信
- AIが「興味深い」と判断したイベントのみが、時刻や場�所などのメタデータタグと共にストレージに書き込まれます。
- 選別されたデータだけを送信するため、通信帯域幅が狭い(速度が遅い)ワイヤレス通信(Starlinkなど)でもデータを送り返すことが可能になります。
5. オープンソースによる開発
- McGwier 氏は、これらのAI推論エンジンやデータ処理のためのコード(TPU用のコードやトラッキング用コードなど)をすべてGitHub上でMITライセンス(誰でも自由に使用・改変可能)として公開しています,,。
- 彼は既存のハードウェア(NPU)の不具合を修正するコードまで書いており、コミュニティ全体が利用できるように貢献しています。
要約すると、このシステムにおけるAIの役割は、「現場で即座にノイズとシグナルを分別し、人間が分析すべき『真の異常データ』だけを効率的に抽出・保存すること」です。
関連プロジェクトと知見
リアルセンサーによるUFO/UAPおよびUSOの追跡という文脈において、 Bob McGwier 氏が提供する「関連プロジェクトと知見」は、彼の過去の成功体験、現在開発中の具体的なソフトウェア群、そして水中物体の物理的特性に関する洞察に分類されます。
これらについて、ソースに基づいて以下のように説明できます。
1. 過去の成功事例:Hawkeye 360と「政府への導入」
McGwier 氏の現在のプロジェクトの信頼性を裏付ける重要な要素として、彼が共同設立した企業「Hawkeye 360」の事例が挙げられます。
- 概要: 衛星を使用して地上の無線送信機(RF信号)の位置を特定するシステムです,。
- 成果: このシステムは、インド国境における中国軍の集結や、ガラパゴス諸島周辺での違法漁船を検知するなど、政府機関が把握していなかった重要な情報を捉えることに成功しました,。
- 文脈的意義: 当初、政�府はこの技術に関心を示しませんでしたが、現在では米国の諜報活動の一部として採用されています,。これは、 McGwier 氏が「政府に先駆けて革新的なセンサーネットワークを構築し、後にそれが標準として認められる」という実績を持っていることを示唆しています。
2. 現在のUAP追跡ソフトウェア群(GitHubリポジトリ)
McGwier 氏は、単にセンサーを作るだけでなく、「既知の物体を確実に除外(フィルタリング)する」ためのソフトウェアエコシステムを構築しています。これらはMITライセンスで公開されています,。
- United Flight Tracker: 上空を飛行するすべての航空機を追跡するシステムです。観測された物体が飛行機であれば、即座に「興味なし(I don't care box)」として処理し、誤認を防ぎます,。
- Visible Ephemeris(可視天体暦): 政府が公開している軌道情報に基づき、現在地から見える人工衛星を追跡します。さらに、その衛星が太陽光を反射して光っているかどうかも計算し、UFOと誤認されるのを防ぎます。
- Passive Radar (Kraken): 近くにある強力なFMラジオ局やテレビ局の電波を利用し、空を横切る物体を追跡するパッシブ・レーダー技術です。
- Adaptive Filtering: カ��ルマンフィルタなどの非線形フィルタリング技術を用いて、移動物体の追跡精度を高めるための数学的処理です。
3. USO(未確認潜水物体)に関する知見:「ファスト・ウォーカー」
McGwier 氏は、海軍時代の経験や物理学的知見に基づき、USOの特性について具体的な洞察を提供しています。
- ファスト・ウォーカー(Fast Walker): 1990年代後半、原子力潜水艦USSハンプトンでの任務中、ソナー担当者が「音速よりも速く水中を移動する物体」を検知した事例を紹介しています。
- 物理的な矛盾: 水は非圧縮性であるため、既知の人工物がそのような速度で移動することは物理的に極めて困難です。
- スーパーキャビテーション: 物体が水中で超高速移動する際に発生する気泡(スーパーキャビテーション)の可能性について議論されていますが、これは数キロ先からでも聞こえるほどの騒音を発するため、無音で高速移動する物体とは矛盾する可能性があります。
- 水の変位(Displacement)がない: 別の事例として、ダイバーのスコット・キャッセル氏が目撃した「金の立方体」が、水を一切押しのけることなく高速移動したという報告が挙げられており、これが現在の物理学では説明がつかない挙動であることが強調されています,。
4. 外部組織との連携
- Skywatcher: McGwier 氏は、宇宙軍(Space Force)やデビッド・グルーシュ氏らが関与するプロジェクト「Skywatcher」のアドバイザーとして招聘されています。
- SCU (Scientific Coalition for UAP Studies): 彼は自身のシステムで収集したデータとレポートをSCUに提出し、科学的な貢献を行うことを目指しています。
要約すると、これらのソースは、 McGwier 氏が「既知の物体(飛行機や衛星)を徹底的に排除」し、「安価なハードウェアでパッシブ・レーダーや信号処理を駆使」することで、科学的に検証可能な異常データ(ファスト・ウォーカーなど)のみを抽出するシステムを構築していることを示しています。
今度の課題
リアルセンサーによるUFO/UAPおよびUSOの追跡という文脈において、提供されたソースおよびこれまでの会話に基づき、 Bob McGwier 氏が描く今後の展望について説明します。
彼の展望は、単に技術を開発するだけでなく、それを科学的なコミュニティで検証し、一般市民の手で広範囲に展開するという具体的なロードマップに基づいています。
1. 科学的検証とSCU(UAP研究のための科学連合)への正式参加
McGwier 氏の当面の最大の目標は、自身が開発したシステムの実効性を科学的に証明することです。
- 詳細なレポートの発表: 彼は、システム全体の構成とパフォーマンスデータを含む詳細なレポートをSCU(Scientific Coalition for UAP Studies)に提出する計画を持っています。
- 「変なデータ」によるトレーニング: SCUへの発表に先立ち、彼はAIモデルをトレーニングするために、実際に「奇妙なデータ」が取れそうな2つの場所へ行き、実地テストを行う予定です。
- 正会員への道: 彼はこのシステムとレポートを、SCUの「正会員(full member)」になるための「チケット」と位置づけており、科学的な裏付けのあるデータ収集を確立しようとしています。
2. コードと知識の完全オープンソース化
今後の展開において、彼は技術を独占するつもりはありません。
- MITライセンスでの公開: システムに関わるすべてのコード(USO検出、UAP追跡、AI推論など)は、GitHub上でMITライセンス(無制限の許可)の下で公開されます,,。
- 対価は「クレジット」のみ: 彼は金銭的な見返りを求めておらず、ユーザーに対して「ボブから入手した」というクレジット表記だけを求めています,。これにより、世界中の開発者や研究者が彼の技術を基盤に発展させることが可能になります。
3. 「草の根」ネットワークの構築と配備
McGwier 氏は、政府や軍に頼らず、一般市民による観測網を広げることを目指しています。
- ターゲット地域: 特に南カリフォルニ��ア(サンタカタリナ島周辺など)を重要なターゲットエリアとして挙げており、この地域の住民が積極的に参加することを期待しています。
- 長期的な自律運用: 将来的には、ボート所有者や沿岸住民が、ロブスターの罠やブイのようにこの装置を海に沈め、ソーラーパネルで電力を供給しながら、数ヶ月から数年にわたって放置(自律稼働)できる運用形態を想定しています,。
- クラウドへの統合: 彼自身がクラウドポータルを維持するリソースはないかもしれませんが、収集されたデータはクラウドベースの分析コンソール(MUPASポータルのようなもの)に簡単に統合できる形式で出力される予定です。
4. カンファレンスでの発表
直近の予定として、彼はリード・サマーズ(Reed Summers)氏が主催するUAPカンファレンスのパネルディスカッションに参加し、短い時間枠(15分程度)ですが、このシステムの概要について話すことになっています。
要約すると、今後の展望は、「AIと安価なセンサー技術を完成させ、それをオープンソースとして公開し、南カリフォルニアなどを中心とした一般市民の『草の根』ネットワークを通じて、科学的に検証可能なUAP/USOデータを大量に収集する」というものです。
情報源
動画(59:00)
- 📱 How Real Sensor Systems Track UFOs/UAP and USOs
300 views 2026/02/04
📱 PHONE VIEW: In this episode of Podcast UFO, we are joined by Dr. Robert McGwier, widely known as “Science Bob,” for a deep, technical discussion on UAP and USO detection through automated sensor data gathering.
Dr. McGwier brings decades of experience in applied mathematics, signal processing, and national-security–level data analysis. This conversation moves beyond speculation and focuses squarely on how real-world sensor systems—such as radar, sonar, electro-optical/infrared platforms, acoustic sensors, and passive detection arrays—are used to identify, correlate, and evaluate anomalous objects operating in air and undersea environments.
We explore how modern sensor fusion works, what automated detection pipelines can (and cannot) reliably tell us, how false positives arise, and what standards must be applied before data can be considered credible. The discussion also addresses the challenges of classification, data access, and the limitations inherent in current monitoring systems.
This episode is essential viewing for anyone interested in a serious, data-driven approach to UAP and USO research—where engineering, physics, and analytics take precedence over anecdote.
GITHUB: https://github.com/n4hy?tab=repositories
GEMINI: https://gemini.google.com/share/0d4f4... sightings/ufo-encounter-voicemail 🧢 Podcast UFO Merch (Shirts, Hats & More): https://tinyurl.com/mrybmnwb 📬 FREE Sign Up for Our Weekly Newsletter — Get updates on upcoming guests, blog posts, and more: http://eepurl.com/LPHKD 🌐 Our Website: https://podcastufo.com
Robert McGwier the director of research of the Ted and Karyn Hume Center for National Security and Technology, and a research professor in its Bradley Department of Electrical and Computer Engineering.
The Hume Center, administered jointly by Virginia Tech's Institute for Critical Technology and Applied Science and the College of Engineering, heads the university's educational and research programs in national security, and has taken a leading role in the university's growth in cyber security.
Since 1986, McGwier has served as a member of the technical staff at the Institute for Defense Analyses' Center for Communications Research in Princeton, N.J., where he worked on advanced research topics in mathematics and communications supporting the federal government. He received his Ph.D. in applied mathematics from Brown University in 1988.
An expert in radio frequency electronics and signal processing, much of McGwier's research has looked at leveraging recent advances in software-defined and cognitive radio technology to support the communications needs of the federal government. His work on behalf of the federal government has earned him many awards, including the intelligence community's highest honor in 2002.
00:00 Welcome & Episode Overview 01:24 Show Updates & Announcements 06:22 Meet Dr. Robert McGwier 08:08 Early Life & Scientific Path 13:05 UFO Encounters & Missing Time 16:31 USOs and Underwater Anomalies 18:55 Naval Encounters with UAPs 23:39 Detecting USOs Underwater 26:07 The Hydro Sentinel Concept 29:12 AI, Sensors & Data Pipelines 32:46 Open-Source Detection & GitHub 38:03 Can UAPs Manipulate Sensors? 41:03 Government, Space Force & Data 45:14 Tools, Tracking & Public Access 51:10 Why Detection Is So Hard 54:58 What Comes Next 57:38 Closing Thoughts
(2026-02-05)